 Share this Page
Share this PageSelected Publications
This page contains a selection of papers or articles I authored, with full abstracts. For a compact full list of publications check the About Me Page.Omegalib: a Multi- View Application Framework for Hybrid Reality Environments
Authors: Febretti, A. Nishimoto, A., Mateevitsi, V., Renambot, L., Johnson, A., Leigh, J.
IEEE Virtual Reality (IEEE VR 2014), Minneapolis, MN, March 29 - April 2, 2014.
In the domain of large-scale visualization instruments, hybrid reality environments (HREs) are a recent innovation that combines the best-in-class capabilities of immersive environments, with the best-in-class capabilities of ultra-high-resolution display walls. HREs create a seamless 2D/3D environment that supports both information-rich analysis as well as virtual reality simulation exploration at a resolution matching human visual acuity. Co-located research groups in HREs tend to work on a variety of tasks during a research session (sometimes in parallel), and these tasks require 2D data views, 3D views, linking between them and the ability to bring in (or hide) data quickly as needed.
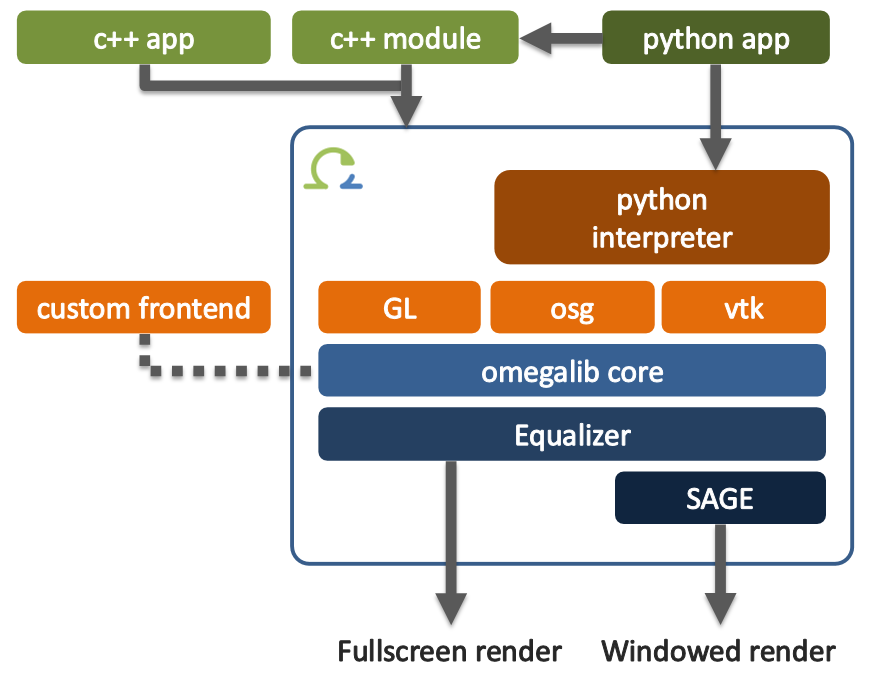
In this paper we present Omegalib, a software framework that facilitates application development on HREs. Omegalib is designed to support dynamic reconfigurability of the display environment, so that areas of the display can be interactively allocated to 2D or 3D workspaces as needed. Compared to existing frameworks and toolkits, Omegalib makes it possible to have multiple immersive applications running on a cluster-controlled display system, have different input sources dynamically routed to applications, and have rendering results optionally redirected to a distributed compositing manager. Omegalib supports pluggable front-ends, to simplify the integration of third-party libraries like OpenGL, OpenSceneGraph, and the Visualization Toolkit (VTK).
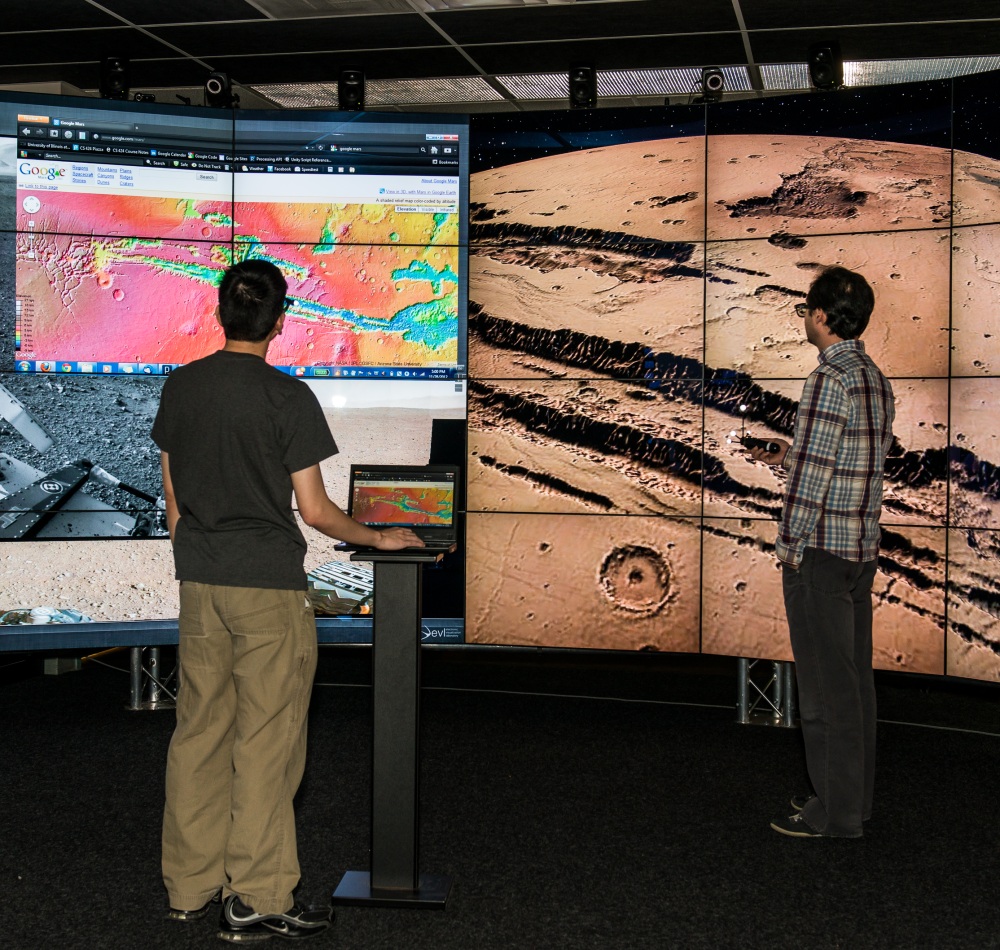
We present examples of applications developed with Omegalib for the 74-megapixel, 72-tile CAVE2™ system, and show how a Hybrid Reality Environment proved effective in supporting work for a co-located research group in the environmental sciences.
Visualizing Large, Heterogeneous Data in Hybrid Reality Display Environments

Authors: Reda, K., Febretti, A., Knoll, A., Aurisano, J., Leigh J., Johnson, A., Papka, M., Hereld, M.
IEEE Computer Graphics and Applications, Vol. 33.4 (July-August 2013), pp. 38-48.
Scientists today are grappling with complex scientific phenomena that require the concentrated effort of interdisciplinary teams of scientists from different backgrounds whose work involves large, heterogeneous data sources. To uncover hidden relationships and make insights, related elements from these distinct datasets must be visualized and analyzed collectively, at the same time. Constructing integrative visualizations that simultaneously cater to a variety of data types is challenging.
Hybrid Reality environments represent a new kind of visualization spaces that blurs the line between virtual environments and tiled display walls. These hybrid environments provide high-resolution, stereoscopic display surfaces to juxtapose a variety of datasets while providing a range of naturalistic interaction schemes. Hybrid Reality environments thus empower designers to construct integrative visualizations that are more effective at mashing up 2D, 3D, temporal, and multivariate datasets. We describe the benefits of these systems and illustrate their power with several real-world science applications.
A Component-Based Evaluation Protocol for Clinical Decision Support Interfaces
Authors: Febretti, A., Lopez, K., Stifter, J., Johnson, A., Keenan, G., Wilkie, D.
HCI International, 2013.
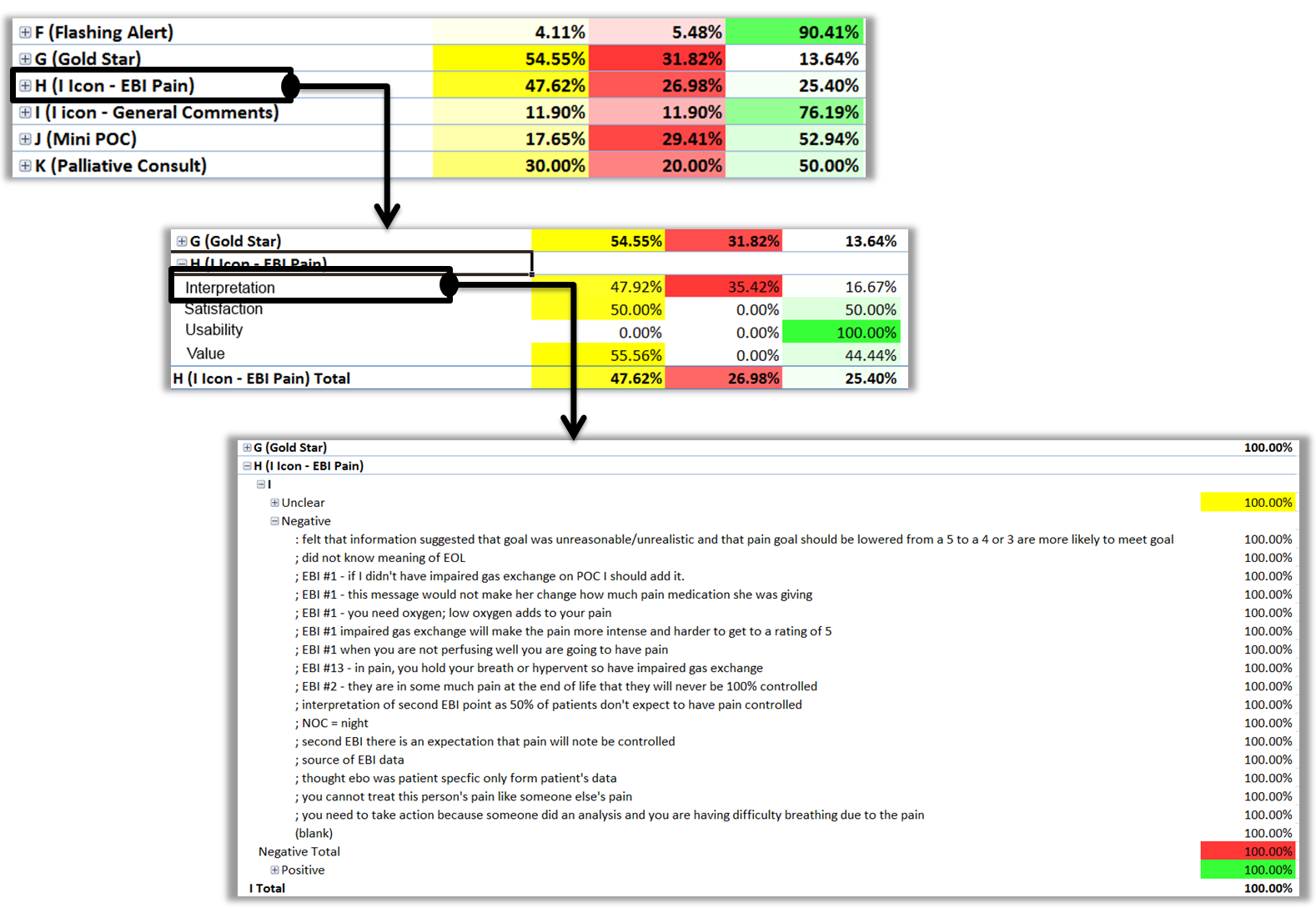
In this paper we present our experience in designing and applying an evaluation protocol for assessing usability of a clinical decision support (CDS) system. The protocol is based on component-based usability testing, cognitive interviewing, and a rigorous coding scheme cross-referenced to a component library.
We applied this protocol to evaluate alternate designs of a CDS interface for a nursing plan of care tool. The protocol allowed us to aggregate and ana-lyze usability data at various granularity levels, supporting both validation of existing components and providing guidance for targeted redesign.
CAVE2: A Hybrid Reality Environment for Immersive Simulation and Information Analysis
Authors: Febretti, A., Nishimoto, A., Thigpen, T., Talandis, J., Long, L., Pirtle, J., Peterka, T., Verlo, A., Brown, M., Plepys, D., Sandin, D., Renambot, L., Johnson, A., Leigh, J.
IS&T/SPIE Electronic Imaging. International Society for Optics and Photonics, 2013.
Hybrid Reality Environments represent a new kind of visualization spaces that blur the line between virtual environments and high resolution tiled display walls. This paper outlines the design and implementation of the CAVE2TM Hybrid Reality Environment. CAVE2 is the world's first near-seamless flat-panel-based, surround-screen immersive system. Unique to CAVE2 is that it will enable users to simultaneously view both 2D and 3D information, providing more flexibility for mixed media applications.
CAVE2 is a cylindrical system of 24 feet in diameter and 8 feet tall, and consists of 72 near-seamless, off-axis-optimized passive stereo LCD panels, creating an approximately 320 degree panoramic environment for displaying information at 37 Megapixels (in stereoscopic 3D) or 74 Megapixels in 2D and at a horizontal visual acuity of 20/20. Custom LCD panels with shifted polarizers were built so the images in the top and bottom rows of LCDs are optimized for vertical off-center viewing- allowing viewers to come closer to the displays while minimizing ghosting.
CAVE2 is designed to support multiple operating modes. In the Fully Immersive mode, the entire room can be dedicated to one virtual simulation. In 2D model, the room can operate like a traditional tiled display wall enabling users to work with large numbers of documents at the same time. In the Hybrid mode, a mixture of both 2D and 3D applications can be simultaneously supported. The ability to treat immersive work spaces in this Hybrid way has never been achieved before, and leverages the special abilities of CAVE2 to enable researchers to seamlessly interact with large collections of 2D and 3D data. To realize this hybrid ability, we merged the Scalable Adaptive Graphics Environment (SAGE) - a system for supporting 2D tiled displays, with Omegalib - a virtual reality middleware supporting OpenGL, OpenSceneGraph and Vtk applications.
Download pdfPoisson reconstruction of extreme submersed environments: The ENDURANCE exploration of an under-ice Antarctic Lake

Authors: Febretti, A., Richmond, K., Gulati, S., Flesher, C., Hogan, B.P., Johnson, A., Stone, W.C., Priscu, J., Doran, P.
8th International Symposium on Visual Computing (ISVC12), Crete, Greece, Springer-Verlag, Lecture Notes in Computer Science, 07/16/2012 - 07/18/2012
We evaluate the use of Poisson reconstruction to generate a 3D bathymetric model of West Lake Bonney, Antarctica. The source sonar dataset has been collected by the ENDURANCE autonomous vehicle in the course of two Antarctic summer missions. The reconstruction workflow involved processing 200 million datapoints to generate a high resolution model of the lake bottom, Narrows region and underwater glacier face. A novel and flexible toolset has been developed to automate the processing of the Bonney data.
Download pdfThe OmegaDesk: Towards A Hybrid 2D & 3D Work Desk
Authors: Febretti, A., Mateevitsi, V.A., Chau, D., Nishimoto, A., McGinnis, B., Misterka, J., Johnson, A., Leigh, J.
7th International Symposium on Visual Computing (ISVC11), Las Vegas, Nevada, 09/26/2011 - 09/28/2011
OmegaDesk is a device that allows for seamless interaction between 2D and 3D content. In order to develop this hybrid device, a new form of Operating System is needed to manage and display heterogeneous content. In this paper we address the hardware and software requirements for such a system, as well as challenges. A set of heterogeneous applications has been successfully developed on OmegaDesk. They allowed us to develop a set of guidelines to drive future investigations into 2D/3D hybridized viewing and interaction.
Download pdfSub-Ice Exploration of an Antarctic Lake: Results from the ENDURANCE Project
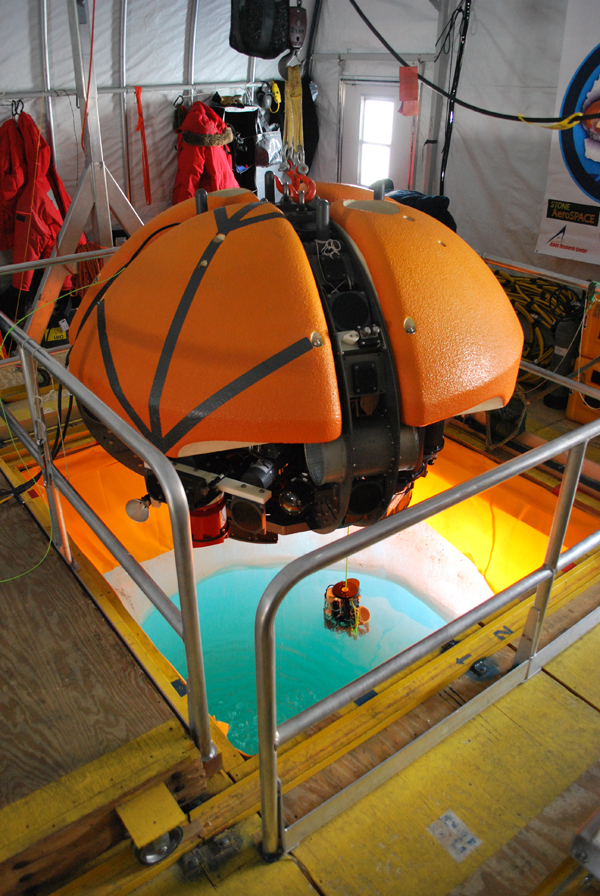
Authors: Richmon, K., Febretti, A., Gulati, S., Flesher, C., Hogan, B.P., Murarka, A., Kuhlman, G., Sridharan, M, Johnson, A., Stone, W.C., Priscu, J., Doran, P.
17th International Symposium on Unmanned Untethered Submersible Technology (UUST11), Portsmouth, NH, US, 08/21/2011 - 08/24/2011
The ENDURANCE autonomous underwater vehicle was developed and deployed to explore and map a unique environment: the waters of Lake Bonney in Taylor Valley, one of the McMurdo Dry Valleys of Antarctica. This permanently ice-covered lake presented several unique challenges and opportunities for exploration and mapping with an AUV. ENDURANCE was successfully deployed in 2008 and 2009, completing the first full synoptic 3-D chemical profile and high-resolution 3-D geometric mapping of such a body of water. Following the 2008 campaign, several upgrades were made to the vehicle to improve its exploration capabilities. The most significant of these was replacement of two battery packs. The improved energy capacity of these batteries coupled with analysis of in-situ transit speed efficiency tests resulted in an almost tripled range of the vehicle. This fact, combined with a longer fiber-optic data tether, enabled vastly more ambitious missions during the 2009 campaign. In addition, operational changes were made in 2009, including a super-ballasted mode to enable the vehicle to operate within the super-saline lower lake layers and investigate previously inaccessible areas of the Taylor Glacier face. ENDURANCE successfully navigated in the presence of ice cover and large density gradients, including precise approach and negotiation of narrow passageways and demonstrated autonomous melt hole location, position lock and auto recovery on a routine, daily basis. It performed general automated mapping and profiling surveys, as well as detailed studies of localized phenomena, operating in an extreme, remote, unknown environment. Post-processing of the data gathered on the two campaigns has made available a never-before-seen level of detail greatly enhancing the understanding of the lake biogeochemistry. The ENDURANCE project has demonstrated new underwater mapping capabilities to enhance the understanding of extreme, unique environments. Many of the characteristics and capabilities of ENDURANCE now successfully demonstrated in complex under-ice settings beneath West Lake Bonney are the types of behaviors that will be needed for sub-ice autonomous probes to Europa, Enceladus, and other outer planet watery moons.
Download pdfUsability, Playability, and Long-Term Engagement in Computer Games
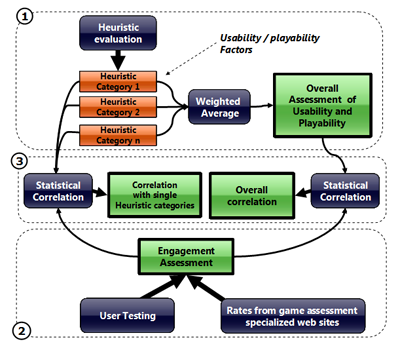
Authors: Febretti, A., Garzotto, F.
CHI 2009 Work In Progress, Boston, MA, ACM SIGCHI, 04/04/2009 - 04/09/2009
Does usability affect long term user engagement in computer games, or are other factors more influential? This paper explores this issue, discussing an evaluation study that measured the relevance of usability versus playability factors for long-term user engagement in eight commercial games.
Download pdfEvaluating the Flash Platform for Web-based Collaborative Data Visualization
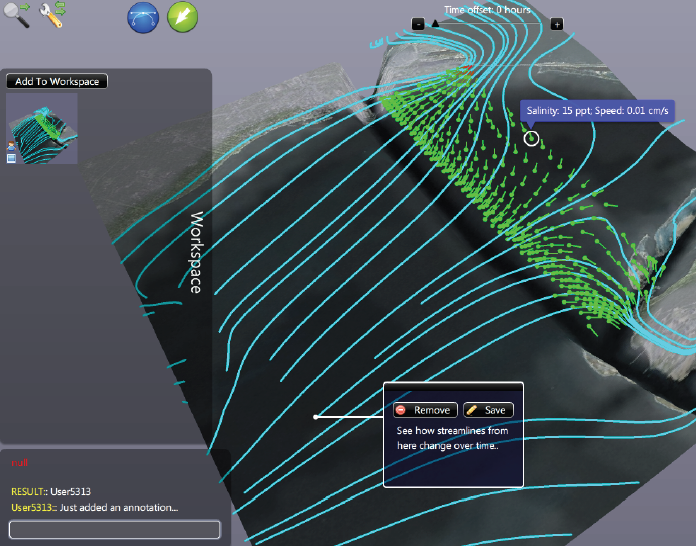
Authors: Febretti, A.
M.S. Thesis, Politecnico di Milano and University of Illinois at Chicago, 2006
This thesis will present and discuss the use of Adobe Flash for the implementation of collaborative visualization applications over the web. The work will be driven by the analysis of typical requirements for this kind of applications, depending on their usage context: in particular, the work will address requirements of visualization applications targeted at public users, rather than scientists or other professionals with specific knowledge about visualization systems. Public users dispose of little or no training on the application, need simplified access to data which is usually of limited complexity, and may prefer an application that, while being functional, also offers a pleasant interactive experience. The Flash technology may bring several advantages to the developement of such a system, compared to other available alternatives. The work will first define a novel and simple conceptual visualization framework: the framework will be based on the standard dataflow visualization model, expanding it to add support for interaction and collaborative work. The framework design will be kept as simple as possible to support easy and fast developement of web applications based on it. A prototype implementation of the framework will be built using the Flash technology, and a proof-of-concept visualization application will be developed on top of the framework, to test its capabilities. The final evaluation of the technological choice and of the developed system will consider both the success of the application in respecting the specified requirements, and the developement effort needed to implement the overall system.
Download pdfWhitepapers and Articles
Template Choice and Template Hierarchy Graph construction during the Partition Phase in reconfigurable environments
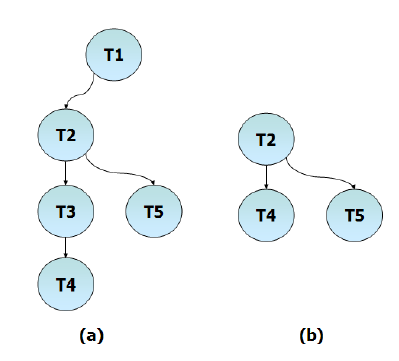
Authors: Febretti, A., Frossi, A.
Laboratory of Microarchitectures, Politecnico di Milano, 2006
This project is intended to be used within the PandA Project, developed in Politecnico di Milano. The primary objective of the PandA project is to develop a usable framework that will enable the research of new ideas in the HW-SW Co-Design field; the current research program aims at defining an efficient high-level synthesis tool that starting from C, C++ or SystemC system descriptions generates synthesizable VHDL RTL descriptions. The problem addressed in this report is the Template Choice and Candidate Evaluation in the context of partial dynamic reconfiguration on FPGAs (Field Programmable Gate Array). Given as input a set of possible templates that cover a Data Flow Graph, we want to identify isomorphic subgraphs common to at least two of those templates, and classify them using given thresholds and metrics.
Download pdfFast late-bound invocation through Dynamic Method delegates
Authors: Febretti, A.
Codeproject, 2005
Reflection is a feature that allows a program to find out type (and metadata) information about objects at run-time. Programs written in languages that support Reflection, like Java and the CLR languages family (C#, Visual Basic .NET etc.) can inspect types, obtain detailed information about class members, dynamically instantiate classes and invoke methods at run-time. The .NET Framework exposes its reflection services through the System.Reflection namespace. Late-bound invocation, for instance, can be achieved through the Type.InvokeMember and MemberInfo.Invoke methods. The use of Reflection, however, comes with a price. While some of its functions are pretty fast, some others, like late-bound invocation routines, are costly and if not used wisely could result in a major bottleneck inside your application. The basic idea presented here is to obtain a method handle through the common Reflection services, and then emit MSIL code to patch up a static call site for the method. This call site will be kept as simple as possible: no type safety / security checks will be performed, assuming that hybrid invocation is done only between fully trusted code entities. Generation of the MSIL call site will be done through a new feature of the .NET Framework 2.0, called Lightweight Code Generation (LGC). Hybrid invocation can be achieved also under .NET Framework 1.1 using the standard Reflection.Emit facilities, but at the price of a heavier implementation.
Download pdf Original article