Right Turns?
Does the same waitUntil Command block work for right turns?
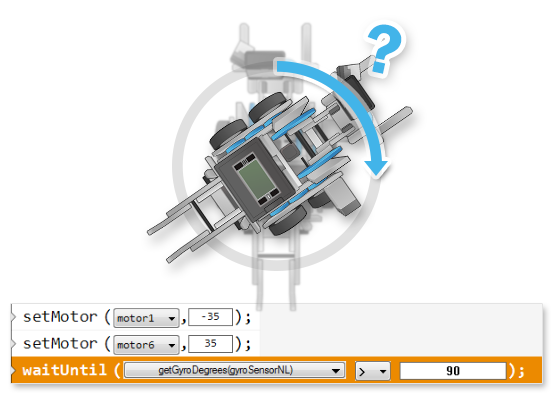
Hint: To turn right, the left motor (motor1) should spin forward (positive power),
and right motor (motor6) should spin backward (negative power).
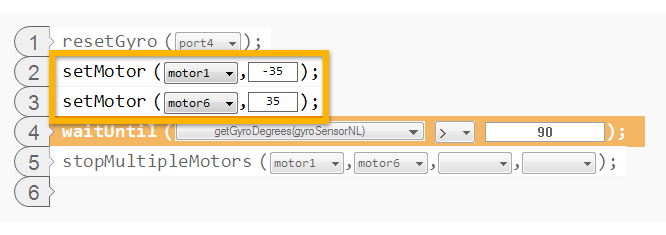
Make these changes to the part of your program as shown below.
| It spins forever! For the VEX IQ, turning to the right actually makes the value negative! REMEMBER THIS FOR THE FOLLOWING MINI-CHALLENGE! |
Did you know?
How Gyro Sensor Works|
The VEX IQ Gyro Sensor is a MEMS Sensor (Micro- ElectroMechanical System) |
Did you know?
turnLeft/turnRight with Gyro Sensor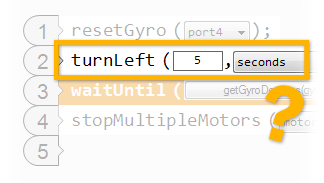 |
Why can't a programmer cannot just use the turnLeft and turnRight commands with the Gyro Sensor?
|