LED Feedback
It can be hard to tell which part of your program the robot is running when your programs have multiple steps.
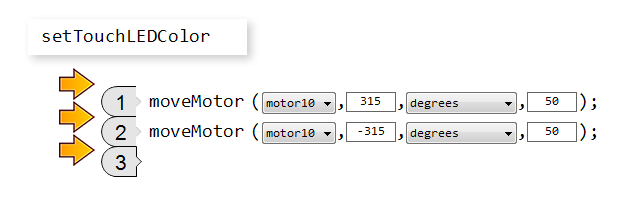
| The program runs in sequential order, from top to bottom. Depending on where setTouchLEDColor is placed, the Touch LED can react to how the arm motor moves. |
Did you know?
Gearing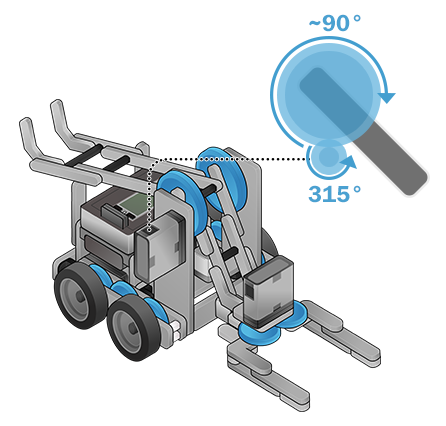 |
The arm motor needs to turn 315 degrees to move the arm between the up and down positions, but the arm itself does not move 315 degrees.
|
Did you know?
How to Avoid Claw Motor Getting Stuck
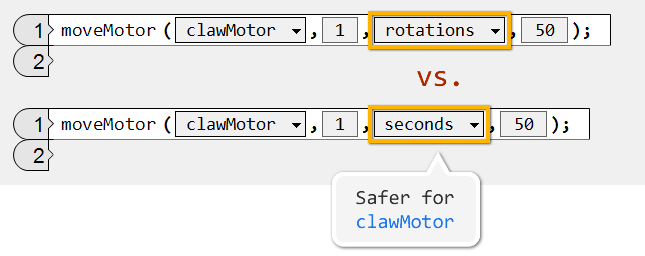
When controlling the Claw motor with the moveMotor command block, you should consider using seconds (or milliseconds) as the unit type. By choosing timing, you will prevent a scenario where the moveMotor command block cannot complete its movement and halts the program flow. Consider this scenario: The VEX IQ claw is already opened to its max position. 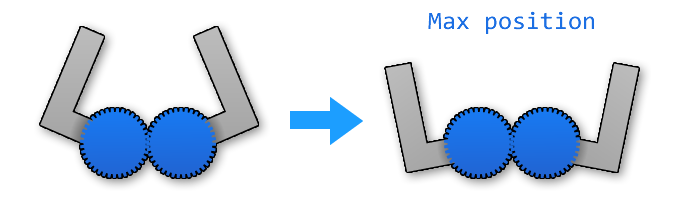
|
|
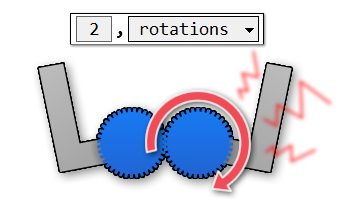 |
The robot must finish 2 rotations of rotation on the claw
no matter what, even if the claw cannot be opened any farther!
When this happens, your robot will be stuck on the moveMotor block forever. To stop the robot, simply terminate the program. |
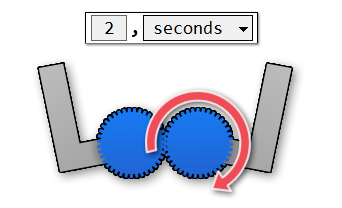 |
If "2 seconds" is used as the stopping condition, the robot will
still try to open the claw farther, but this time, the robot
will try it only for 2 seconds.
After 2 seconds, the robot will give up, and the program moves onto the next command block. |