Different Motions
You can create many different type of motion by combining different motor speeds.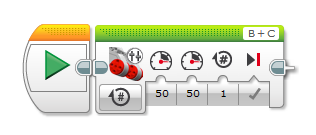
|
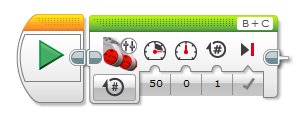
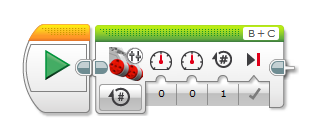
The robot moves straight forward (at 50% power) until the wheels have completed 1 rotation. |
|
The robot makes a "wide" turn to the left until the moving wheel completes 1 rotation. |
|
The robot brakes to hold in place. Note that because it has been told to keep doing this "for 1 rotation", it will never complete the action (it's braking, so it can't complete 1 rotation) |
|
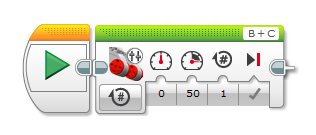
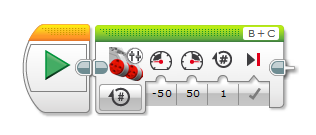
The robot turns in place, spinning to the left until the wheels have completed 1 rotation. |
|
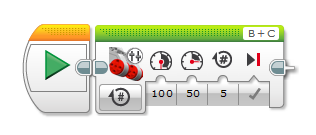
The robot makes a curved movement, forward and to the right, until its wheels have completed 5 rotations. |